Насосы и насосные станции
Доставка сельхозтехники и запасных частей, оросительных систем, насосов во все города России (быстрой почтой и транспортными компаниями), так же через дилерскую сеть: Москва, Владимир, Санкт-Петербург, Саранск, Калуга, Белгород, Брянск, Орел, Курск, Тамбов, Новосибирск, Челябинск, Томск, Омск, Екатеринбург, Ростов-на-Дону, Нижний Новгород, Уфа, Казань, Самара, Пермь, Хабаровск, Волгоград, Иркутск, Красноярск, Новокузнецк, Липецк, Башкирия, Ставрополь, Воронеж, Тюмень, Саратов, Уфа, Татарстан, Оренбург, Краснодар, Кемерово, Тольятти, Рязань, Ижевск, Пенза, Ульяновск, Набережные Челны, Ярославль, Астрахань, Барнаул, Владивосток, Грозный (Чечня), Тула, Крым, Севастополь, Симферополь, в страны СНГ:Киргизия, Казахстан, Узбекистан, Киргизстан, Туркменистан, Ташкент, Азербайджан, Таджикистан.
Наш сайт не является публичной офертой, определяемой положениями Статьи 437 (2) ГК РФ., а носит исключительно информационный характер. Для получения точной информации о наличии и стоимости товара, пожалуйста, обращайтесь по нашим телефонам. В случае копирования, использования любого материала находящегося на сайте www.nasos.pro, активная ссылка обязательна, в случае печати – печатная ссылка. Копирование структуры сайта, идей или элементов дизайна сайта строго запрещено. Права на все торговые марки, изображения и материалы, представленные на сайте, принадлежат их владельцам.
Оросительные установки. Агрополив, орошение полей, овощей, картофеля, оросительные системы.

Легкие ручные овощные сеялки (точный высев овощей)
Статьи
|
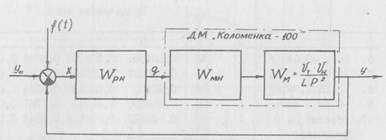
Синтез системы управления машиной «Коломенка-100»
УДК 631.347.2-52 В
настоящее время на поля для полива сельхозкультур стали поставляться
многоопорные широкозахватные дождевальные машины, в частности, на поля
Московской области — дождевальная машина ДМ «Коломенка-100».
«Коломенка-100» представляет собой девятиферменную машину с 10 опорными
тележками. Длина машины 405 м, ширина захвата доящем 450 м, скорость в
зависимости от нормы полива регулируется от 0,1 до 2,35 м/мин. wмл (p)=(y(p))/(q(p))=(Uт*UH)/(Lp2 )=km/p2 где υт, υн
— транспортная и номинальная, соответствующая заданной норме полива,
скорости машины; L - длина машины; У (Р) - отклонение машины от
направляющего кабеля; q(P) - сокращение относительного времени включения
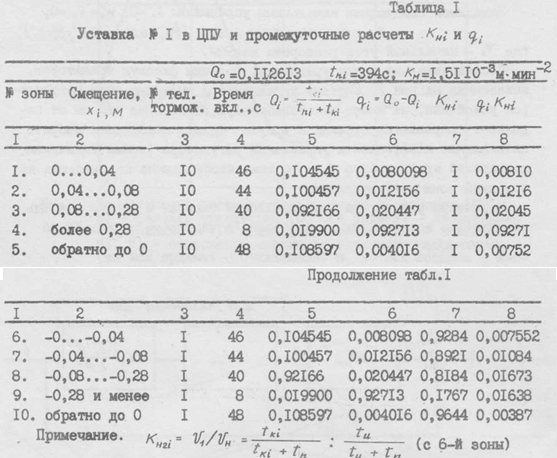
двигaтеля какой-либо крайней опоры; Км = υт•υн/L - коэффициент передачи линейного звена машины. Qo=tu/(tni+tu )=50/(tni+50). C учетом этого уравнения коэффициент передачи машины равен: km=(Ut2)/L*tu/(tu+tni ). При отклонении машины от заданного направления (первой опорной тележки, на которую установлен датчик системы, от направляющего кабеля) время включения двигателя tкi одной из крайних тележек сокращается на определенную величину в зависимости от величины отклонения. На ЦПУ предусмотрены 3 установки управления; для первой установки управления задано следующее время включения двигателей крайних тележек (табл.1) при отклонении машины как в одну, так и в другую сторону от направляющего кабеля.
После
максимального отклонения машины время включения двигателя той же
тележки задается постоянным и равным tp = 48 с до тех пор, пока
отклонение не станет равным нулю. (d2y)/(dt2 )=Ai=Kнi*qi*Km где
Аi = Км(0,0081; 0,0122; 0,0204; 0,0927; 0,004; 0,0075; 0,0106; 0,0167;
0,0164; 0,0039) при хi< 0,04; 0,06; 0,28 м; хi >0,28 м; хi > 0
и хi ẋi < 0; хi > -0,04; -0,06; -0,28 м; хi < -0,28 м; хi
<0 и хiẋi <0.
направляющего кабеля, его амплитуды Вк и длины волны λк. В данном случае предполагается, что возмущения от кабеля поступают на вход системы в виде синусоидальных колебаний.
Длина волны отклонения кабеля, в свою очередь, может быть связана со скоростью машины и частотой его колебаний
Задача синтеза - найти приемлемые параметры управления регулятора ЦПУ tк , исходя из допустимой зоны регулирования коэффициента земельного использования КЗИ, амплитуды и частоты колебания направляющего кабеля, и сформулировать требования к его прокладке.
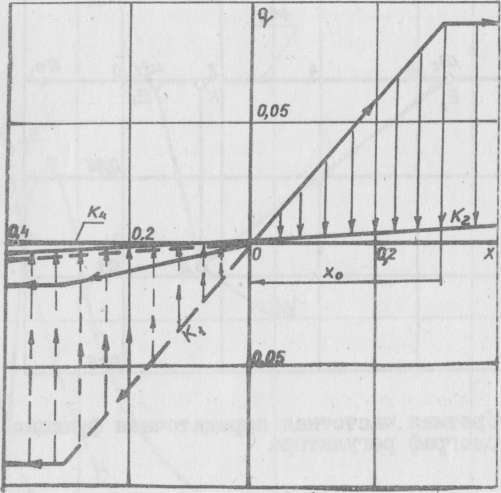
Передаточную функцию обеих гармонически линеаризованных нелинейных звеньев можно записать следующим образом: Для удобства расчета статическую характеристику нелинейных звеньев можно изобразить на рис.3. С учетом указанных допущений гарюническую линеаризацию такого нелинейного регулятора можно записать так:
В данном случае передаточную функцию по ошибке можно записать как
где
А передаточная функция гармонически линеаризованного регулятора
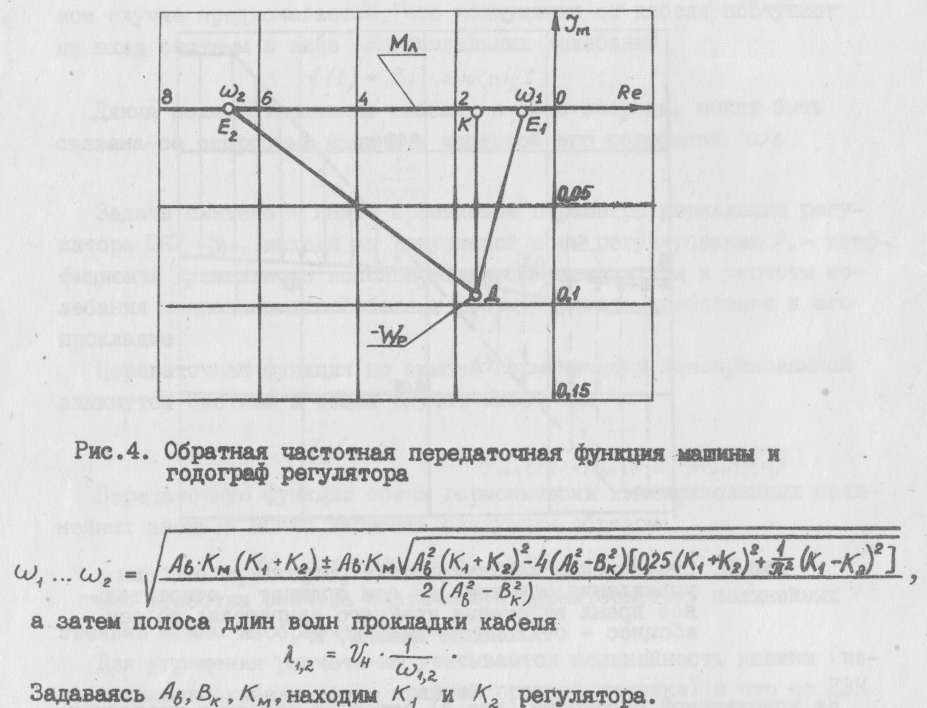
На комплексной плоскости (рис. 4) строится обратная частотная передаточная функция машины Mл(j,w) и годограф регулятора Wp (jw), который выродится в точку Д с координатами Из рис. 4 можно найти амплитуду вынужденных отклонений машины от заданного направления
Задаваясь значением амплитуды вынужденных отклонений машины от заданного направления (зоной регулирования) при различных значениях Км (длины и скорости машины), отклонения кабеля Вк и коэффициента управления регулятора К1 и К2, найдем запретную полосу длин волн прокладки кабеля. Для этого сначала определяется полоса запретных частот ω1…ω2 по формуле.
Рис. 4. Обратная частотная передаточная функция машины и годограф регулятора.
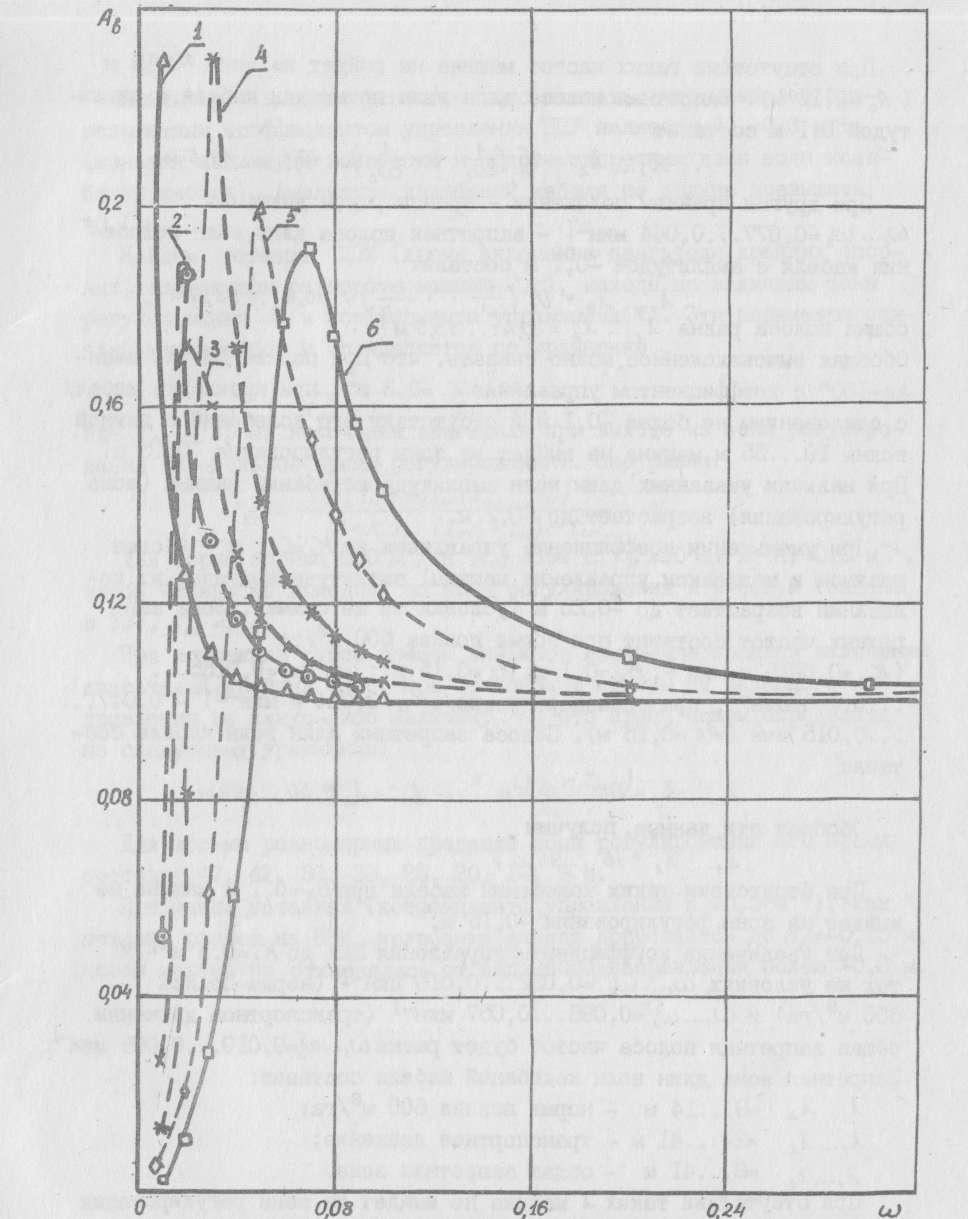
На ЭВМ были просчитаны зависимости амплиоуды вынужденных колебаний машины и полоса запретных частот при различных значениях
При отсутствии таких частот машина не выйдет из зоны ±0,15 м (Ав=0,15 м). Запретная полоса длин волн прокладки кабеля с амплитудой 0,1 м составит
При другом крайнем положении - транспортном движении ω1…ω2=0,077.. .0,044 мин-1 - запретная полоса длин волн колебания кабеля с амплитудой ±0,1 м составит
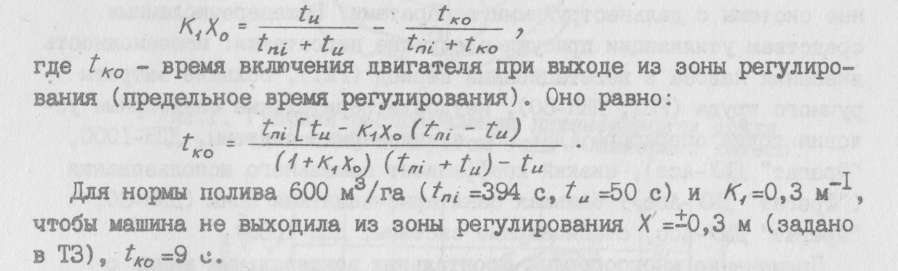
Обобщая вышеизложенное, можно сказать, что при поливе ДМ «Коломенка-100» с коэффициентом управления К1 =0,3 м-1, при прокладке кабеля с отклонением не более ±0,1м и отсутствии его колебаний с длиной волны 10...55м, машина не выйдет из зоны регулирований ±0,15 м. При наличии указанных длин волн амплитуда колебаний машины (зона регулирования) возрастает до ±0,2 м. λ1…λ2=32,5 м и λ1…λ2=50…94 м Обобщая эти данные, получим:λ1…λ2= 16…94 м. При отсутствии таких колебаний кабеля при Вк=0,1м машина не выйдет из зоны регулирования ±0,15 м. При увеличении коэффициента управления ЦПУ до К1=0,5м-1 и тех же условиях ω1…ω2=0,032...0,019 мин-1 (норма полива 600 м3/га) и ω1…ω2=0,096...0,057 мин-1 (транспортном движении), общая запретная полоса частот будет равна ω1…ω2=0,019...0,096 мин-1. Запретная зона длин волн колебаний кабеля составит: λ1…λ2=8...14 м - норма полива 600 м3/га; λ1…λ2=24...41 м - транспортное движение; λ1…λ2=8...41 м - общая запретная зона. При отсутствии таких λ машина не выйдет из зоны регулирования ±0,I5 м. Наличие таких колебаний приведет к увеличению зоны регулирования до ±0,2 м. Анализируя вышеизложенное, можно сказать, что наиболее благоприятным коэффициентом управления ЦПУ является К1 =0,3м-1 (меньшая амплитуда колебаний и полоса запретных длин волн колебания кабеля). Амплитуда колебаний кабеля не должна превышать ±0,1 м. Найдем уставки ЦПУ (время включения двигателя крайних опорных тележек при развороте машины tкi ), исходя из величины зоны регулирования Х0 и коэффициента управления К1. Эти параметры связаны между собой и определяются по уравнению
При коррекции курса примем линейное изменение времени включения двигателей крайних опор. При отклонении машины от заданного направления на какую-либо величину хi это время можем определить по следующему уравнению:
Для восьми равномерных градаций зоны регулирования это время составит 47, 42, 36, 30, 25, 20, 14, 9 с.
перейти в раздел Статьи |


Насос от ВОМа для полива|Дизельные насосные станции для оросительных установок|Насос от ВОМа трактора для оросительных установок|Быстро-сборный трубопровод для оросительных систем |Насосы для оросительных установок|Консоли для орошения|Оросительные системы барабанного типа|Автоматические системы орошения RKD|Центральный пивот RKD|Пивот-мультицентр RKD|Фронтальные системы RKD|Ипподромная система RKD|Компоненты и конструкции RKD|Башни и консоли RKD